 lseeniv1@jh.edu
lseeniv1@jh.edu



 Biography
Biography
I am a Postdoctoral Research Fellow at the Advanced Robotics and Computationally AugmenteD Environments (ARCADE) Lab, led by Dr. Mathias Unberath, in the Department of Computer Science at Johns Hopkins University. My research aims to develop transformative assistive and automation technologies that drive the future of automation in healthcare. I particularly focus on advancing automation across three synergistic domains: (a) clinical training, (b) surgical assistance and automation, and (c) clinical operations analysis and automation.
I earned my Ph.D. in Biomedical Engineering from the National University of Singapore (NUS), under the mentorship of Dr. Ren Hongliang. My doctoral thesis, titled “Scene Understanding through Multimodal Reasoning for Robotic Surgery”, focused on pioneering and advancing vision-language models for surgical scene understanding tasks, including surgical visual-question answering ( SurgicalGPT & Surgical-VQA) and surgical scene graphs. My work on SurgicalGPT won the MICCAI 2023 STudent Author Registration (STAR) Award. I also hold a Bachelor's degree (with Honours) in Electrical Engineering from the NUS and a Diploma in Mechatronics from Temasek Polytechnic, Singapore. During my bachelor's studies, I was awarded the NUS Outstanding Undergraduate Researcher Prize and the Faculty of Engineering's 32nd Innovation & Research Award for my work in the Design-Centric Programme, where our multi-disciplinary team successfully miniaturized surgical tools for minimally invasive surgery using a novel tendon-driven actuation mechanism.
Beyond academia, I bring over four years of industry experience at a robotics startup, where I progressed from a Software Engineer to Engineering Manager, leading the development of delivery robots for the food and warehouse sector. I also have an extensive leadership background, including close to a decade of service as a senior police officer in the Singapore Police Force as part of Singapore's mandatory national service.
I have authored numerous peer-reviewed journal articles and conference papers, including MICCAI, ICRA, RA-L, and IJCARS. I have also won multiple academic and leadership awards. For a detailed list, please refer to my CV or Google Scholar.
 Select Awards
Select Awards

Outstanding Reviewer Award
International Conference on Medical Image Computing and Computer Assisted Intervention 2023
STudent-Author Registration (STAR) Award
International Conference on Medical Image Computing and Computer Assisted Intervention 2023
Outstanding Undergraduate Researcher Prize
National University of Singapore AY2017/2018
FoE 32nd INNOVATION & RESEARCH AWARD
National University of Singapore 2018
Singapore Manufacturing Federation Metal, Machinery & Engineering Industry Group Project Prize
Temasek Polytechnic 2013
Commendation Award for Major Project
Temasek Polytechnic 2013
 Select Publications
Select Publications
(* Co-first author)
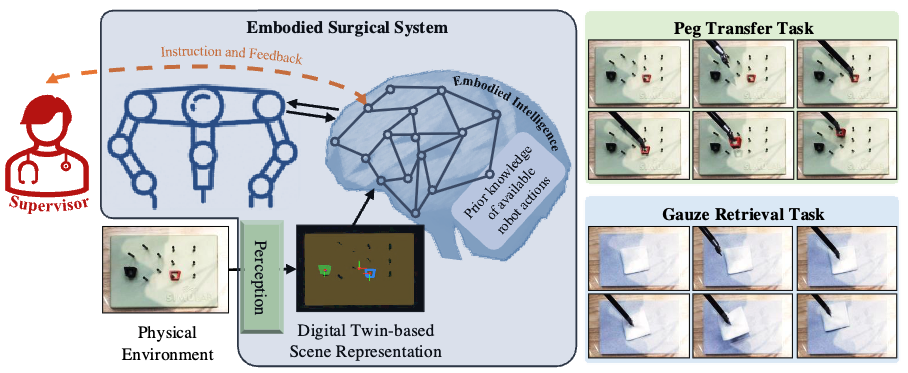
Towards Robust Automation of Surgical Systems via Digital Twin-based Scene Representations from Foundation Models.
Hao Ding, Lalithkumar Seenivasan, Hongchao Shu, Grayson Byrd, Han Zhang, Pu Xiao, Juan Antonio Barragan, Russell H. Taylor, Peter Kazanzides, and Mathias Unberath.
Under review.
[preprint]
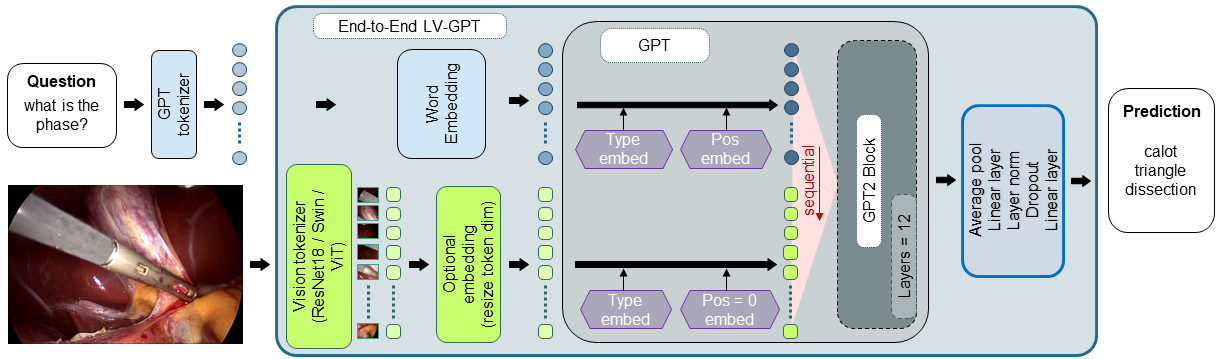
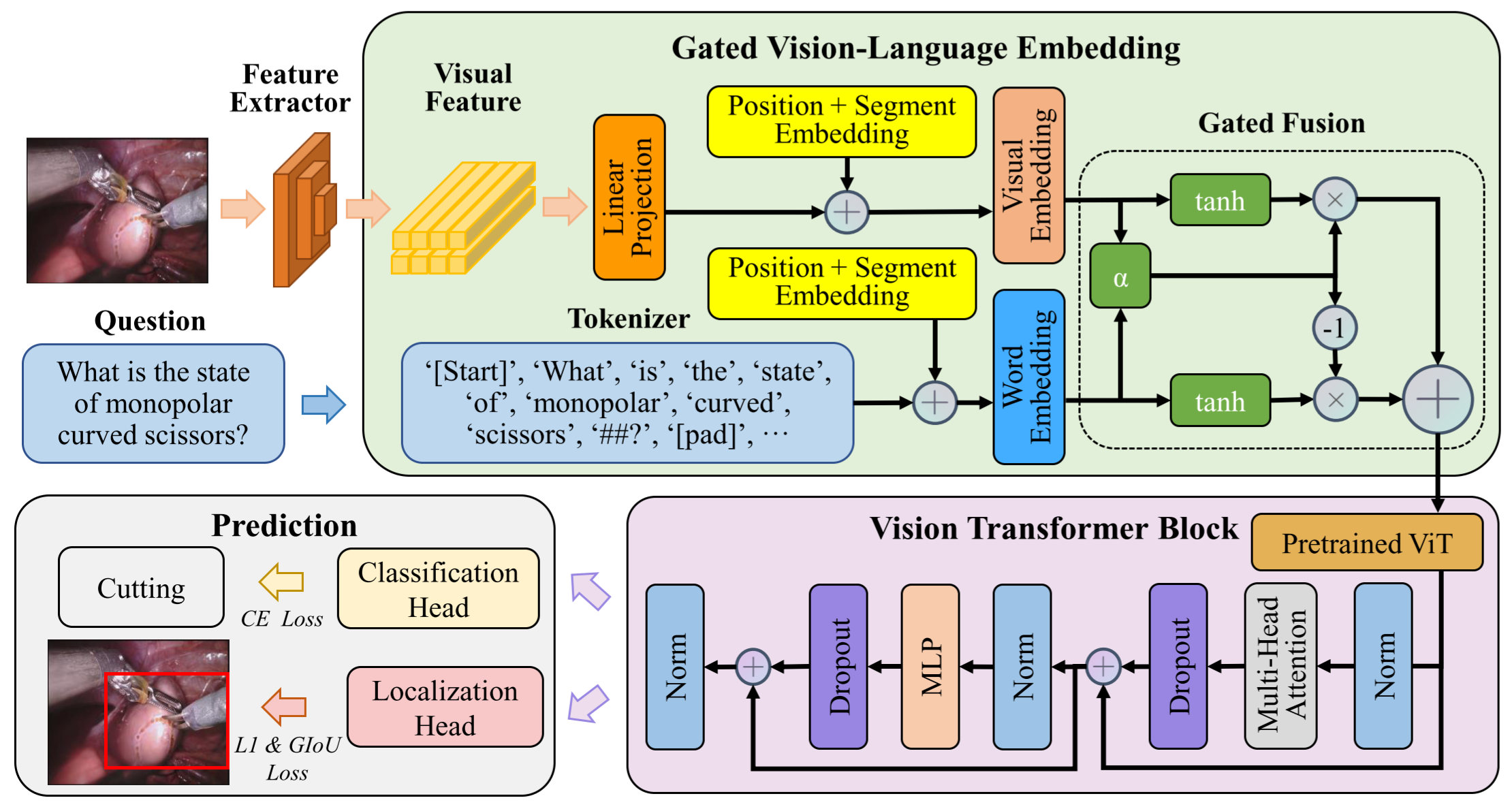
SurgicalGPT: End-to-End Language-Vision GPT for Visual Question Answering in Surgery.
Lalithkumar Seenivasan*, Mobarakol Islam*, Gokul Kannan and Hongliang Ren.
Medical Image Computing and Computer-Assisted Intervention (MICCAI), 2023.
[preprint]
[code (will be made available soon)]
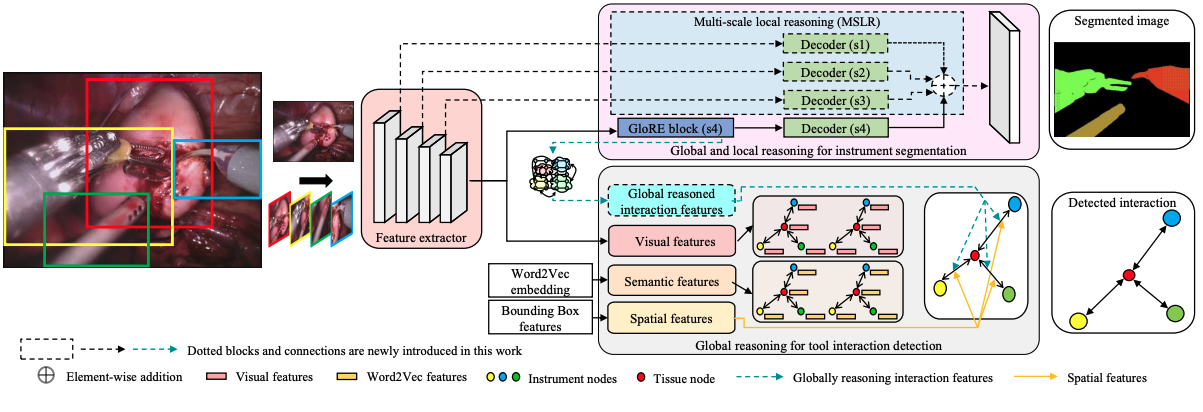
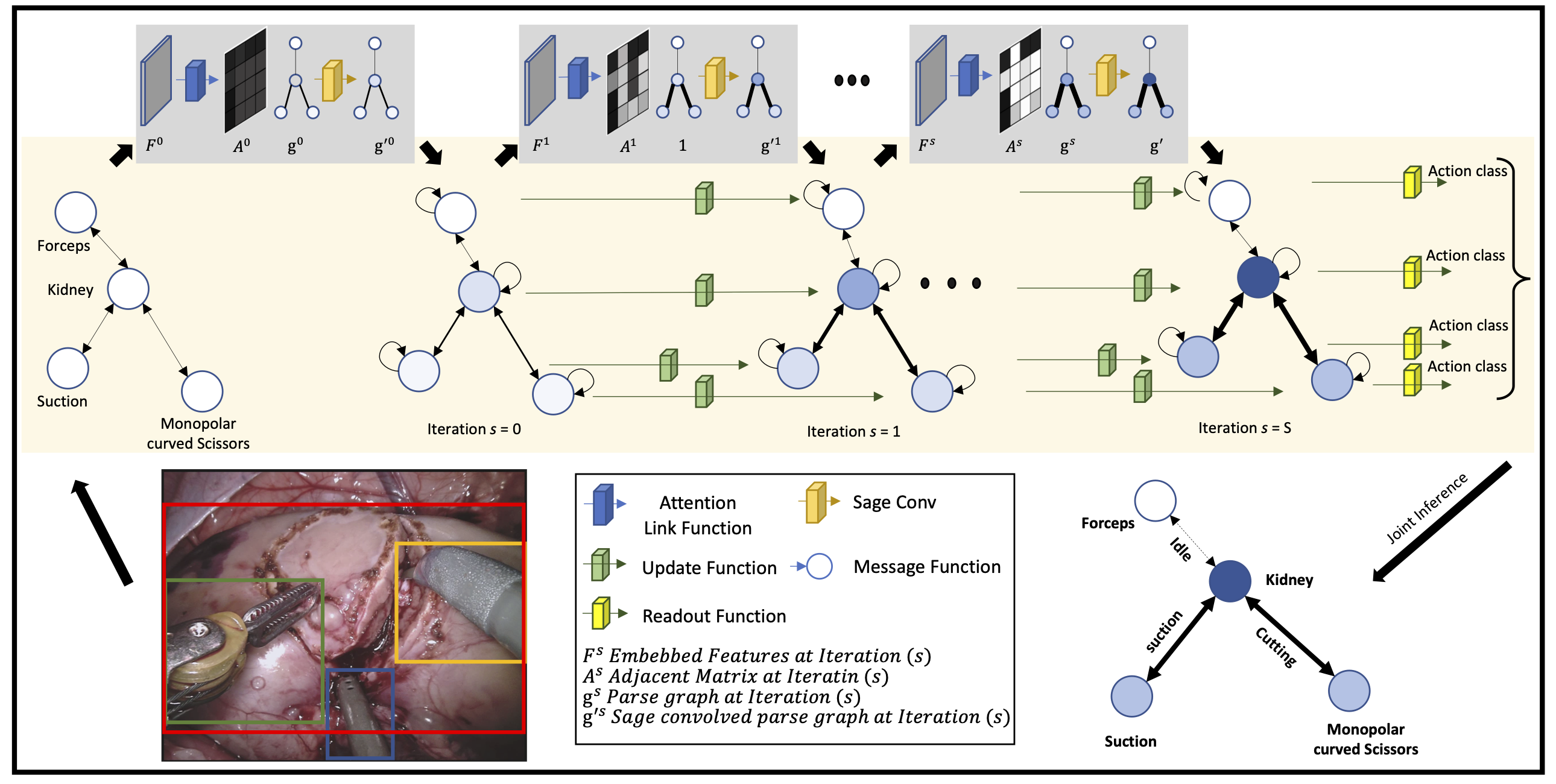
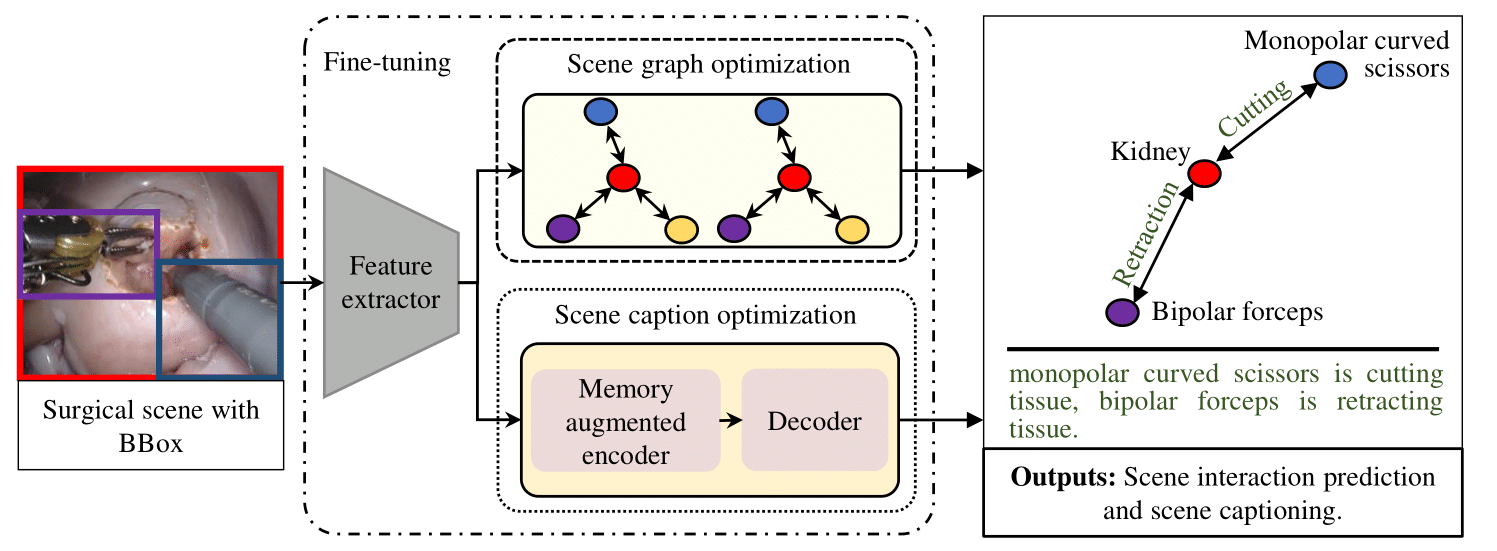
Global-Reasoned Multi-Task Learning Model for Surgical Scene Understanding.
Lalithkumar Seenivasan*, Sai Mitheran*, Mobarakol Islam and Hongliang Ren.
IEEE Robotics and Automation Letters & IEEE International Conference on Robotics and Automation (RA-L & ICRA), 2022.
[preprint][code]
[poster]
[video]
 Select Talks and Presentations
Select Talks and Presentations
Gradient-Based Localized Feature Extraction for End-To-End Surgical Downstream Tasks
IEEE International Conference on Robotics and Automation, London, May. 2023. [video]
Relational Reasoning in VQA Models for Visual Question Answering in Robotic Surgery
ICRA 2023 Workshop:Surgical Robotics London,
May. 2023.
Surgical-VQA: Visual Question Answering in Surgical Scenes Using Transformer
Medical Image Computing and Computer-Assisted Intervention (MICCAI) Singapore, Sep. 2022. [video]
CLEARNESS: Cross-scaLe tEmporAl gRaph NEtwork for Super-reSolutions
IUPESM WORLD CONGRESS ON MEDICAL PHYSICS AND BIOMEDICAL ENGINEERING Singapore, Jun. 2022.
Global-Reasoned Multi-Task Learning Model for Surgical Scene Understanding
IEEE International Conference on Robotics and Automation Philadelphia, May. 2022. [video]
 Academic Services
Academic Services
Program Committee
- DART Workshop, Medical Image Computing and Computer Assisted Intervention (MICCAI), 2023
- DART Workshop, Medical Image Computing and Computer Assisted Intervention (MICCAI), 2022
Meta-Reviewer
- Medical Image Computing and Computer Assisted Intervention (2025)
Reviewer
Journals
- IEEE Transactions on Medical Imaging (2023 - current)
- International Journal of Computer Assisted Radiology and Surgery (2024 - current)
- IEEE Robotics and Automation Letters (2023 - 2025)
- ACM Transactions on Human Robot Interaction (2025)
- IEEE Sensors Journal (2022)
Conferences
- IEEE/RSJ International Conference on Intelligent Robots and Systems (2025)
- International Conference on Information Processing in Computer-Assisted Interventions (2025)
- IEEE International Conference on Robotics and Automation (2023, 2025)
- Medical Image Computing and Computer Assisted Intervention (2023 - 2024)
- DART Workshop, Medical Image Computing and Computer Assisted Intervention (2022-2023)
Conference Papers, Journal Papers and Abstracts
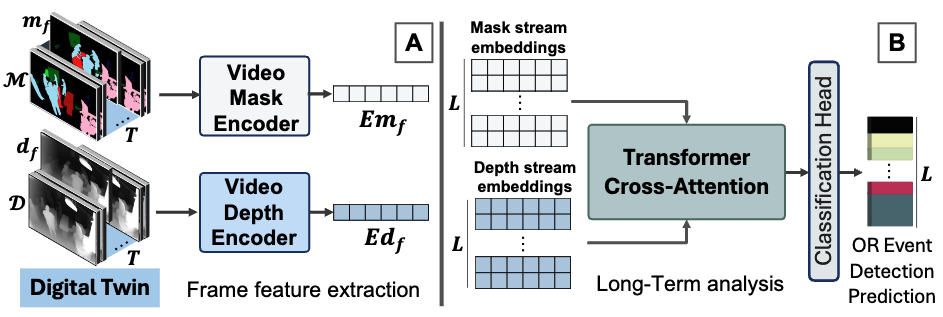
Privacy-Preserving Operating Room Workflow Analysis using Digital Twins.
Alejandra Perez, Han Zhang, Yu-Chun Ku, Lalithkumar Seenivasan, Roger D. Soberanis-Mukul, Jose L. Porras, Richard Day,
Jeff Jopling, Peter Najjar, and Mathias Unberath
Medical Imaging with Deep Learning 2025.
[abstract]
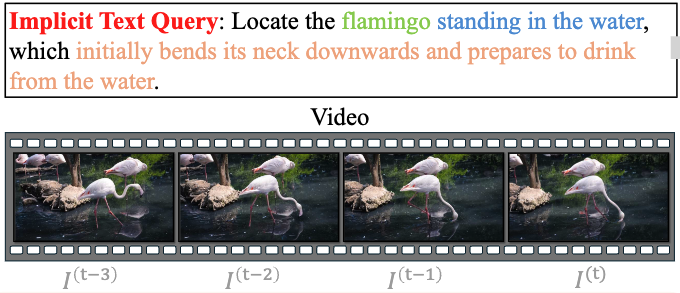
Online Reasoning Video Segmentation with Just-in-Time Digital Twins.
Yiqing Shen, Bohan Liu, Chenjia Li, Lalithkumar Seenivasan, and Mathias Unberath
International Conference on Computer Vision , 2025.
[preprint]
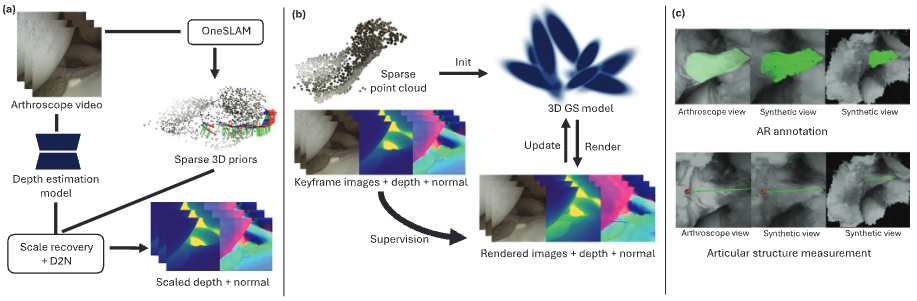
Seamless Augmented Reality Integration in Arthroscopy: A Pipeline for Articular Reconstruction and Guidance.
Hongchao Shu, Mingxu Liu, Lalithkumar Seenivasan, Suxi Gu, Ping-Cheng Ku, Jonathan Knopf, Russell Taylor, and Mathias Unberath
Healthcare Technology Letters 11(6), pp.355-364. Special Issue: MICCAI AE-CAI 2024.
[manuscript]
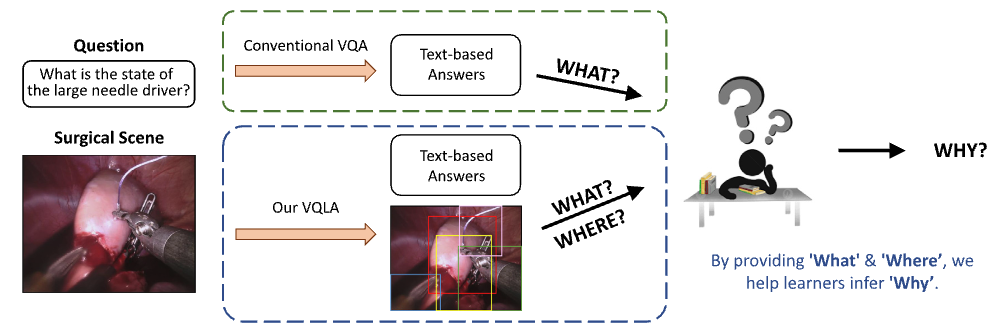
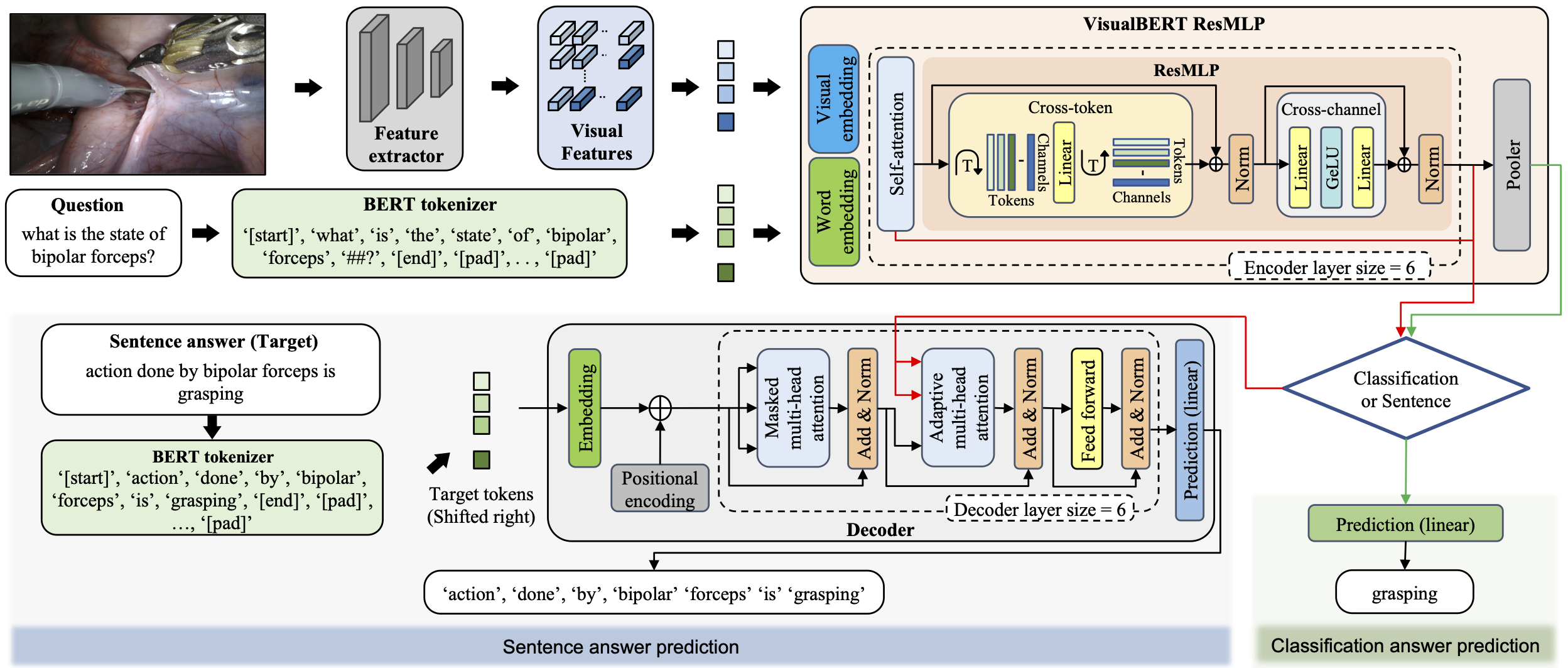
Surgical-VQLA++: Adversarial contrastive learning for calibrated robust visual question-localized answering in robotic surgery.
Long Bai, Guankun Wang, Mobarakol Islam, Lalithkumar Seenivasan, An Wang, and Hongliang Ren
Information Fusion 113 (2025): 102602.
[manuscript]
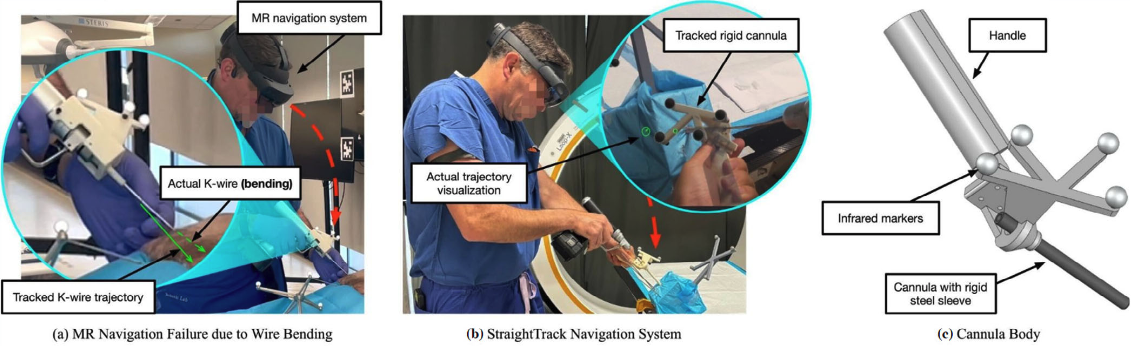
StraightTrack: Towards Mixed Reality Navigation System for Percutaneous K-Wire Insertion.
Han Zhang, Benjamin D. Killeen, Yu-Chun Ku, Lalithkumar Seenivasan, Yuxuan Zhao,
Mingxu Liu, Yue Yang, Suxi Gu, Alejandro Martin-Gomez, Greg Osgood, and Mathias Unberath.
Healthcare Technology Letters 11(6), pp.355-364. Special Issue: MICCAI AE-CAI 2024.
[preprint]
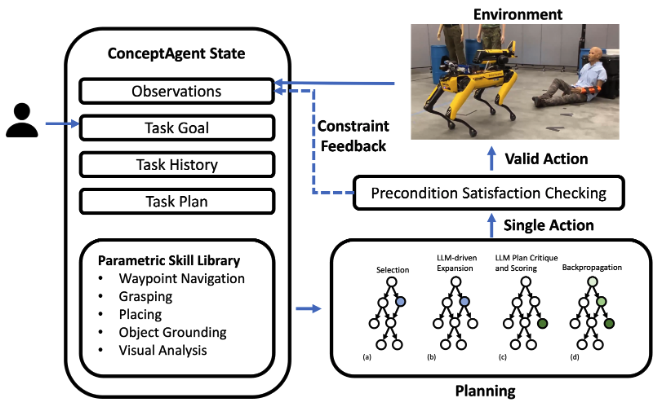
ConceptAgent: LLM-Driven Precondition Grounding and Tree Search for Robust Task Planning and Execution.
Corban Rivera†*, Grayson Byrd*, William Paul*, Tyler Feldman, Meghan Booker, Emma Holmes,
David Handelman, Bethany Kemp, Andrew Badger, Aurora Schmidt, Krishna Murthy Jatavallabhula,
Celso M de Melo, Lalithkumar Seenivasan, Mathias Unberath, and Rama Chellappa.
IEEE International Conference on Robotics and Automation (ICRA), 2025.
[preprint]
Towards Robust Automation of Surgical Systems via Digital Twin-based Scene Representations from Foundation Models.
Hao Ding, Lalithkumar Seenivasan, Hongchao Shu, Grayson Byrd, Han Zhang, Pu Xiao, Juan Antonio Barragan, Russell H. Taylor, Peter Kazanzides, and Mathias Unberath.
Under review.
[preprint]

SegSTRONG-C: Segmenting Surgical Tools Robustly On Non-adversarial Generated Corruptions - An EndoVis'24 Challenge.
Hao Ding, ....., Lalithkumar Seenivasan, ...., and Mathias Unberath.
EndoVis24 Challenge, Medical Image Computing and Computer Assisted Intervention (Challenge, MICCAI), 2024.
[preprint]
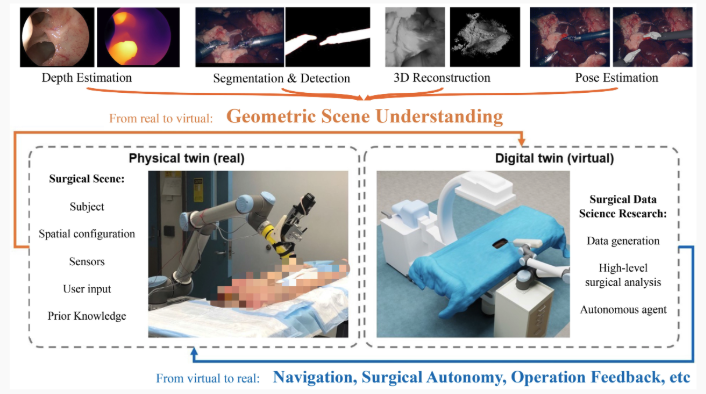
Digital Twins as a Unifying Framework for Surgical Data Science: The Enabling Role of Geometric Scene Understanding.
Hao Ding, Lalithkumar Seenivasan, Benjamin D. Killeen, Sue Min Cho and Mathias Unberath
Artificial Intelligence Surgery 4.3 (2024): 109-138.
[Open Access]
SurgicalGPT: End-to-End Language-Vision GPT for Visual Question Answering in Surgery.
Lalithkumar Seenivasan*, Mobarakol Islam*, Gokul Kannan, Hongliang Ren.
Medical Image Computing and Computer-Assisted Intervention (MICCAI), 2023.
[preprint]
[code (will be made available soon)]
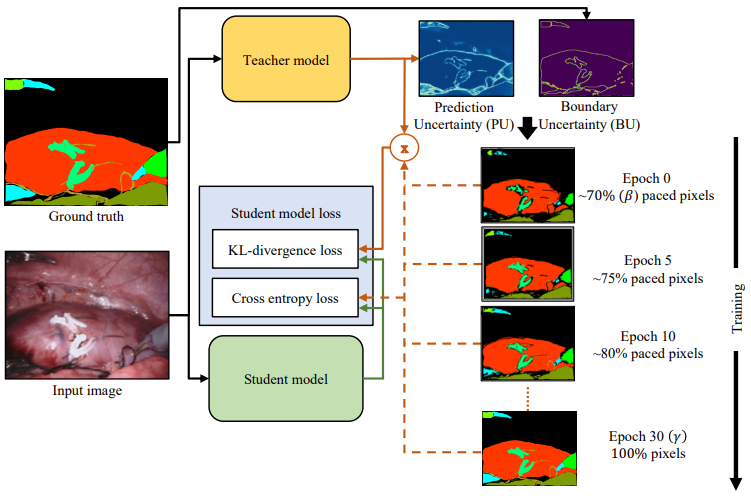
Paced-Curriculum Distillation with Prediction and Label Uncertainty for Image Segmentation.
Mobarakol Islam*, Lalithkumar Seenivasan*, SP Sharan, VK Viekash, Bhavesh Gupta, Ben Glocker and Hongliang Ren.
International Journal of Computer Assisted Radiology and Surgery (IJCARS), 2023.
[preprint]
[code]
Task-aware asynchronous multi-task model with class incremental contrastive learning for surgical scene understanding.
Lalithkumar Seenivasan, Mobarakol Islam, Mengya Xu, Chwee Ming Lim and Hongliang Ren.
International Journal of Computer Assisted Radiology and Surgery (IJCARS), 2023.
[preprint]
[code]
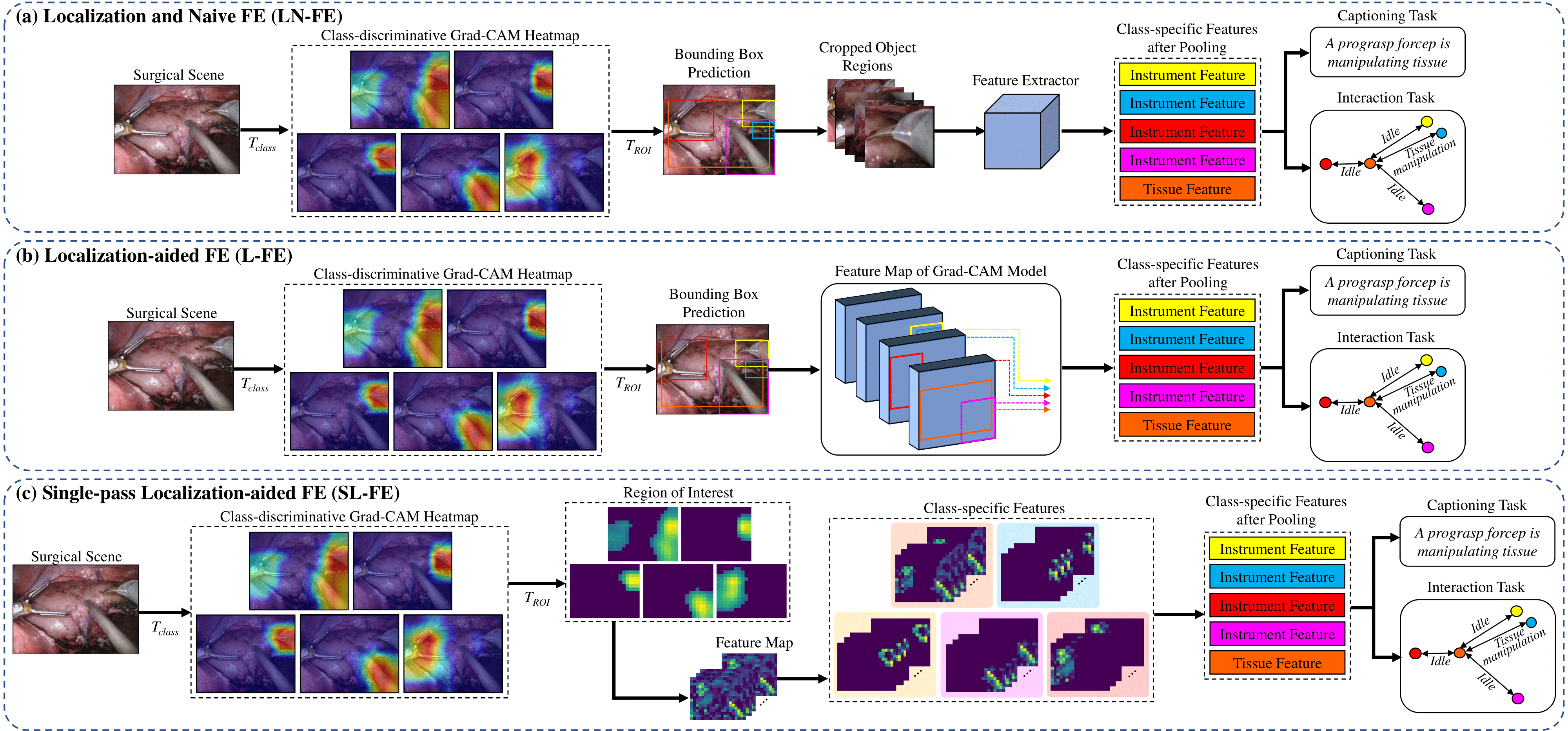
Rethinking Feature Extraction: Gradient-Based Localized Feature Extraction for End-To-End Surgical Downstream Tasks.
Winnie Pang*, Mobarakol Islam*, Sai Mitheran, Lalithkumar Seenivasan, Mengya Xu and Hongliang Ren.
IEEE Robotics and Automation Letters & IEEE International Conference on Robotics and Automation (RA-L & ICRA), 2023.
[preprint]
[code]
[video]
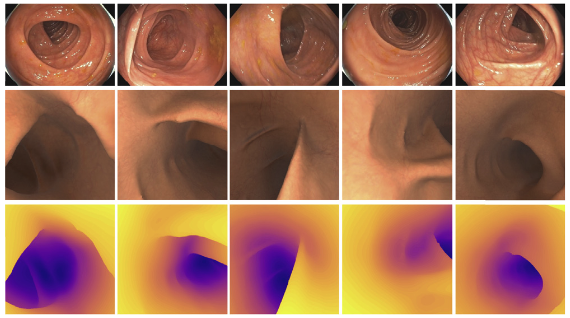
SimCol3D — 3D Reconstruction during Colonoscopy Challenge.
Anita Rau, et. al, ....., Lalithkumar Seenivasan, ...., and Danail Stoyanov
EndoVis22 Challenge, Medical Image Computing and Computer Assisted Intervention (Challenge, MICCAI), 2022.
[manuscript]
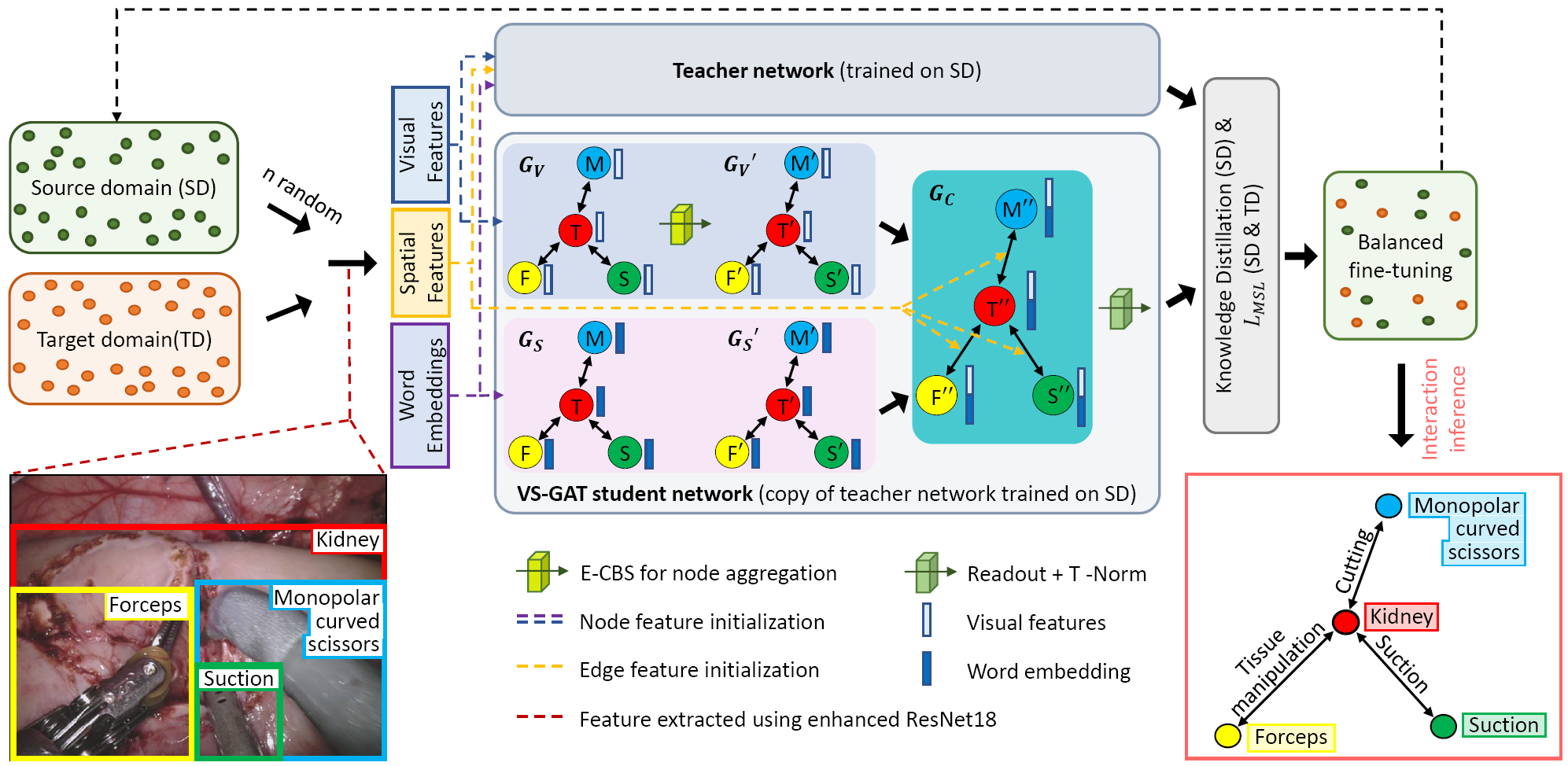
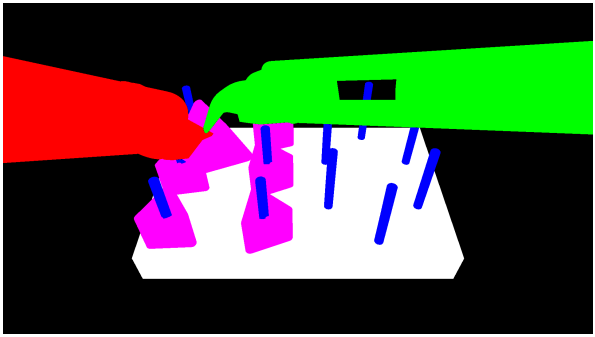
Global-Reasoned Multi-Task Learning Model for Surgical Scene Understanding.
Lalithkumar Seenivasan*, Sai Mitheran*, Mobarakol Islam and Hongliang Ren.
IEEE Robotics and Automation Letters & IEEE International Conference on Robotics and Automation (RA-L & ICRA), 2022.
[preprint][code]
[poster]
[video]
PEg TRAnsfer Workflow Recognition Challenge Report: Do Multi-Modal Data Improve Recognition?.
Arnaud Huaulmé, et. al, ...... Lalithkumar Seenivasan and Pierre Jannin.
EndoVis21 Challenge, Medical Image Computing and Computer Assisted Intervention (Challenge, MICCAI), 2021.
[preprint]
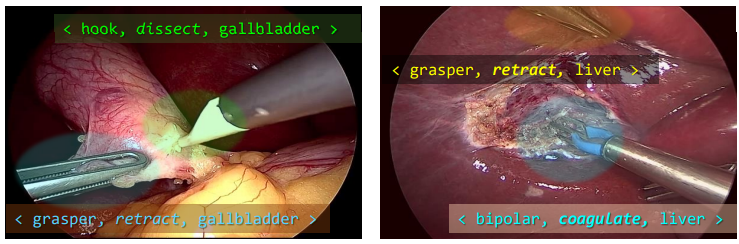
CholecTriplet2021: A benchmark challenge for surgical action triplet recognition.
Chinedu Innocent Nwoye, et. al, ...... Lalithkumar Seenivasan and Nicolas Padoy.
EndoVis21 Challenge, Medical Image Computing and Computer Assisted Intervention (Challenge, MICCAI), 2021.
[preprint]
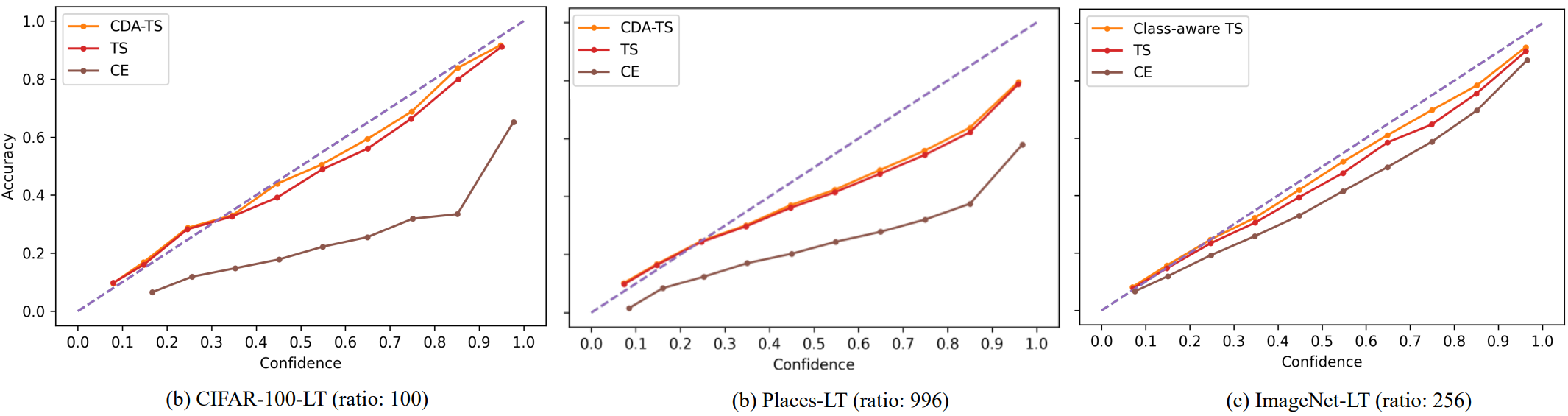
Class-Distribution-Aware Calibration for Long-Tailed Visual Recognition.
Mobarakol Islam, Lalithkumar Seenivasan, Hongliang Ren and Ben Glocker.
UDL Workshop, International Conference on Machine Learning (UDL, ICML), 2021.
[preprint]
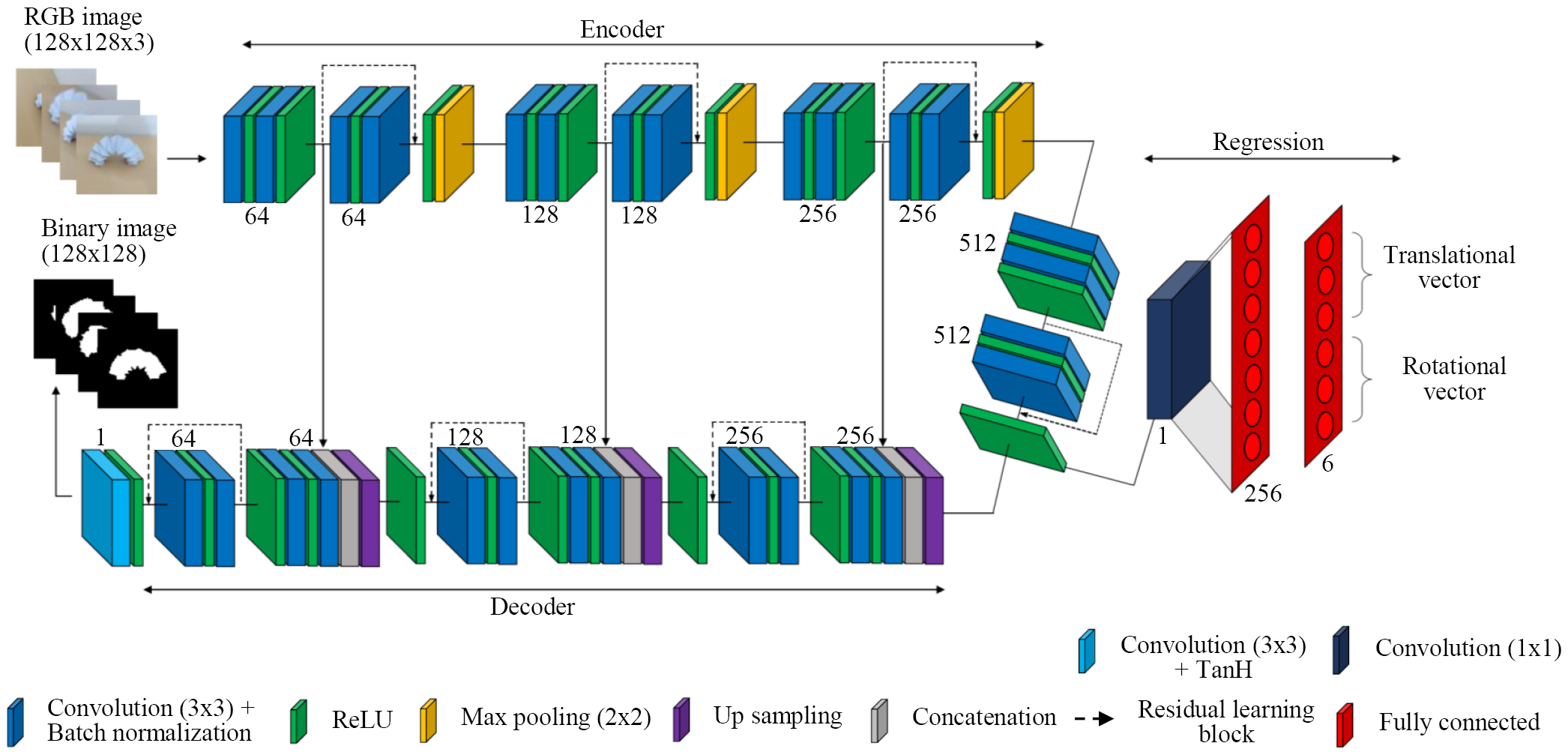
Shape Tracking of Flexible Morphing Matters From Depth Images.
Lalithkumar Seenivasan, Fan Bai, Ming Ji, Xiaoyi Gu, Zion Tsz Ho Tse and Hongliang Ren.
IEEE Sensors Journal, 2021.
[preprint]

Pilot Study and Design Conceptualization for a Slim Single-port Surgical Manipulator with Spring Backbones and Catheter-size Channels.
Hongliang Ren, Cai Xin Chen, Catherine Cai, Krishna Ramachandra and Lalithkumar Seenivasan.
IEEE International Conference on Information and Automation (ICIA), 2017.
[preprint]
Book Chapters
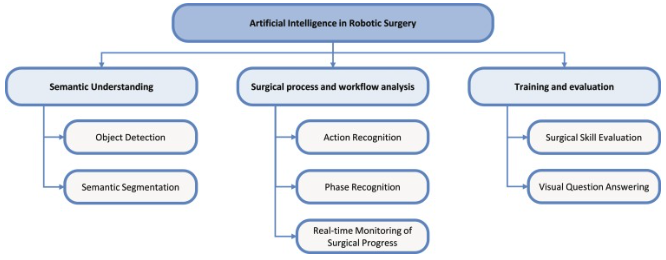
Artificial Intelligence to Understand Robotic Surgery Scenes.
Lalithkumar Seenivasan, and Hongliang Ren.
Handbook of Robotic Surgery, 2025.
[chapter]
Untethered Soft Ferromagnetic Quad-Jaws Cootie Catcher with Selectively Coupled Degrees of Freedom.
Xinchen Cai, Catherine Jiayi Cai, Lalithkumar Seenivasan, Zion Tse and Hongliang Ren.
Deployable Multimodal Machine Intelligence: Applications in Biomedical Engineering, Springer Nature Singapore, 2023.
[preprint]
Tendon routing and anchoring for cable-driven single-port surgical manipulators with spring backbones and luminal constraints.
Lalithkumar Seenivasan, Xinchen Cai, Krishna Ramachandra, Francis Wong and Hongliang Ren.
Flexible Robotics in Medicine: A Design Journey of Motion Generation Mechanisms and Biorobotic System Development, Academic Press, 2020.
[preprint]
Tunable stiffness using negative Poisson's ratio toward load-bearing continuum tubular mechanisms in medical robotics.
Krishna Ramachandra, Catherine Jiayi Cai, Lalithkumar Seenivasan, Xinchen Cai, Zion Tszho Tse and Hongliang Ren.
Control Theory in Biomedical Engineering, Academic Press, 2020.
[preprint]
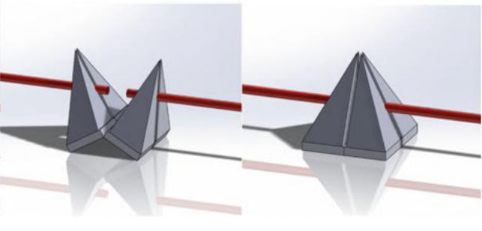
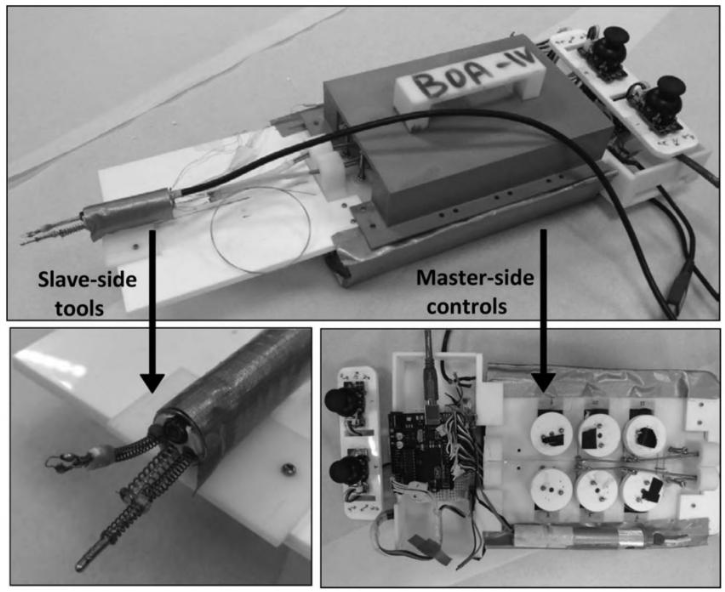
Boa-IV: Image-Guided Minimally Invasive Robotic Surgery
Design-Centric Program Undergraduate Project
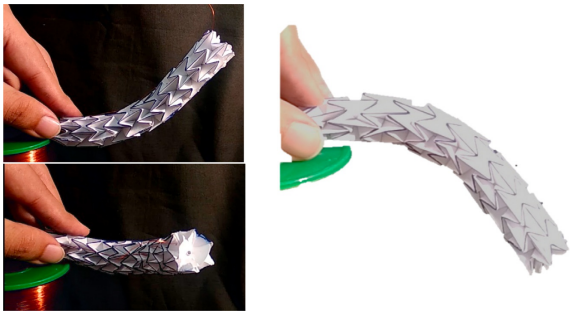
Our team conceptualized and designed a novel tendon-driven actuation mechanism for stem actuation of catheter-size spring-backbone manipulators. Using this novel concept, we are also able to miniaturize surgical tools to a diameter of 2-3m that can be manipulated to perform surgical actions. The miniaturized surgical tools can be deployed through a single-port flexible manipulator, which has an overall shaft diameter of 8-12 mm.
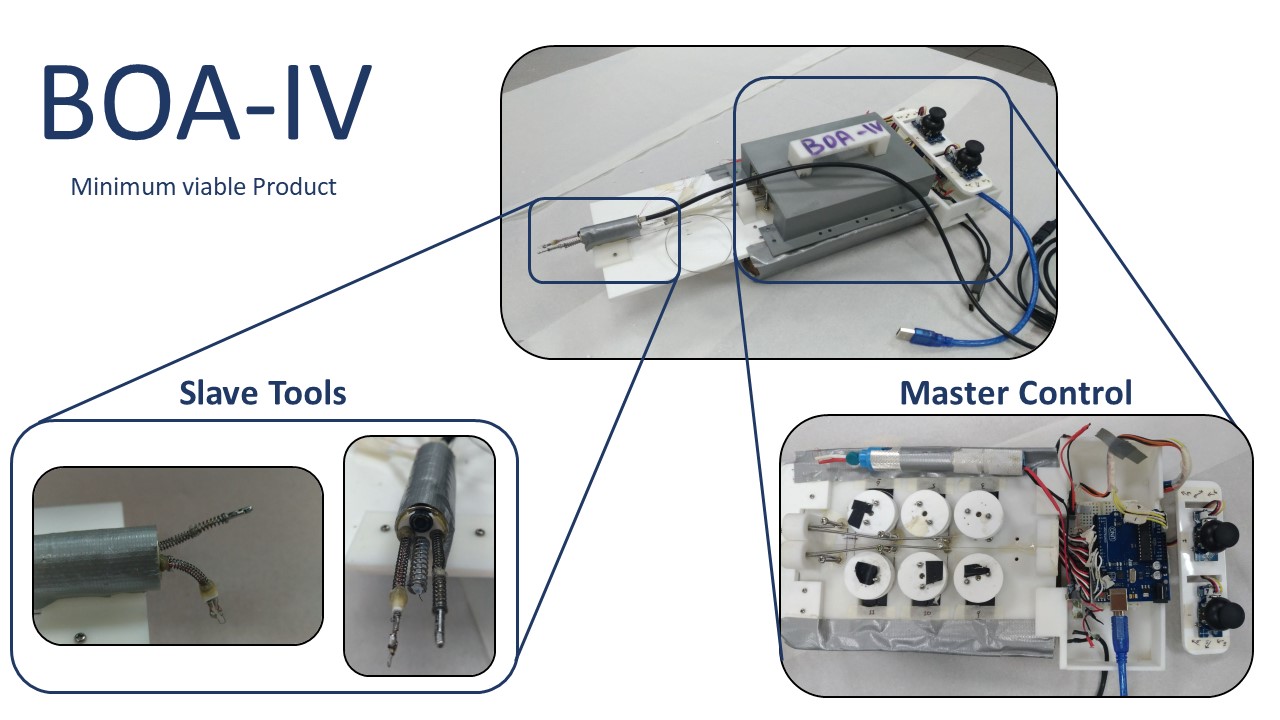
Minimum Viable Product
Slave (Forcepts and electrocautery) Control Demo
Related Papers
-
Pilot Study and Design Conceptualization for a Slim Single-port Surgical Manipulator with Spring Backbones and Catheter-size Channels.
Hongliang Ren, Cai Xin Chen, Catherine Cai, Krishna Ramachandra and Lalithkumar Seenivasan.
IEEE International Conference on Information and Automation (ICIA), 2017. -
Tendon routing and anchoring for cable-driven single-port surgical manipulators with spring backbones and luminal constraints.
Lalithkumar Seenivasan, Xinchen Cai, Krishna Ramachandra, Francis Wong and Hongliang Ren.
Flexible Robotics in Medicine: A Design Journey of Motion Generation Mechanisms and Biorobotic System Development, Academic Press, 2020.
TechX Challenge 2013, Singapore
Diploma Projects
I was part of the Temasek Polytechnic team in the TechX 2013 National Robotic Competition organized by the Defence Science & Technology Agency (DSTA), Singapore . The competition comprised 6 challenges, where, the robots were assessed on their ability to autonomously navigate challenging terrains to conduct search and rescue missions and simultaneously relay information to base station in real-time. Our team managed to pass the qualification round and qualified for the grand finals.
My Specific Contribution
I designed and developed 3D simulations of our robot and competition challenge environments using the ROS and Gazebo simulator. The resultant simulations enabled the software team to test our navigation and sensor processing algorithms.
Robot Simulation
|
Challenge Simulation
|
Robot and Challenge Simulation
Obstacle Avoidance
Staircase Climbing